Lab Facilities
We have conducted a series of nonlinear experiments with the objective of elucidating intriguing nonlinear and chaotic behaviors.
Below is a gallery of the equipment we use in our laboratory.
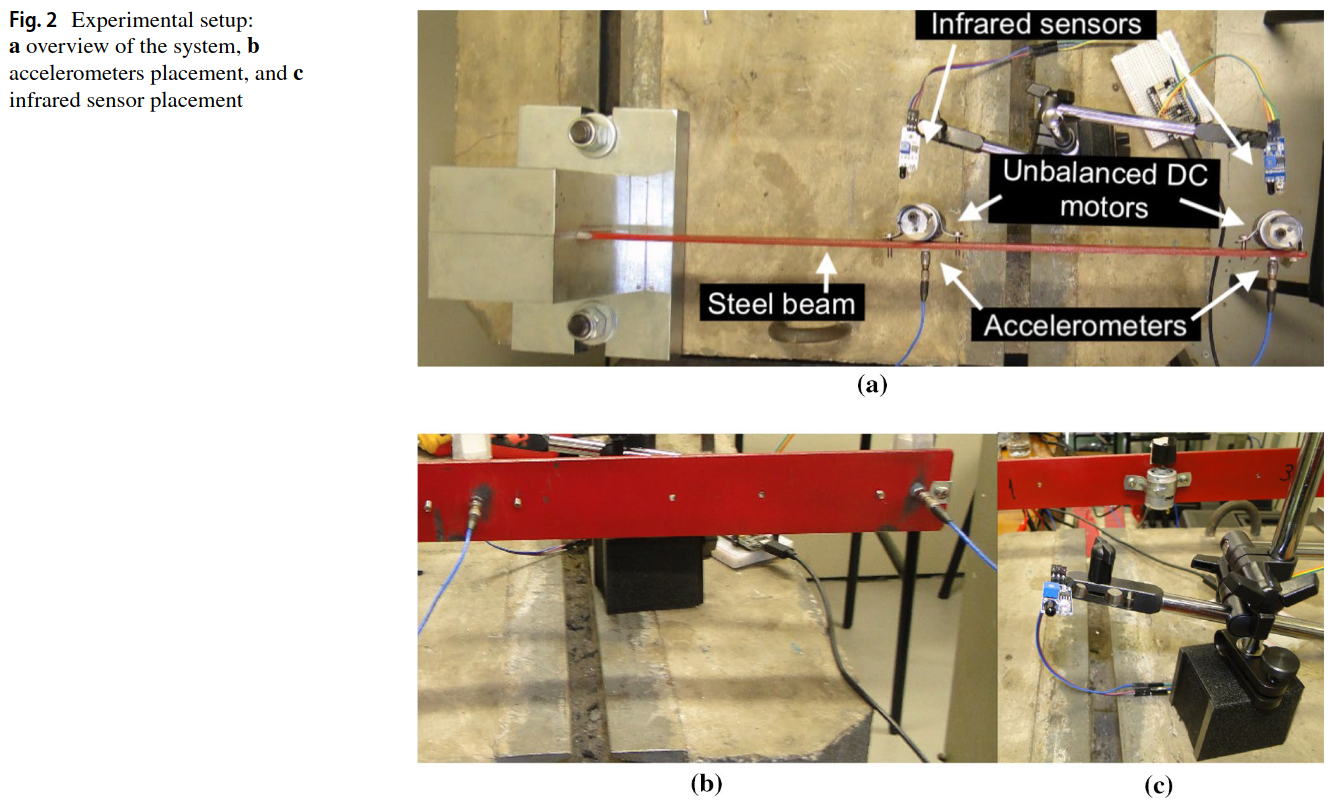
Numerical and experimental investigation of the dynamic behavior of a cantilever beam driven by two non‑ideal sources (UFMS)
References
Development of an in-flight data acquisition system for aircraft Telemaster (UNESP).

- Authors: Rodrigo Martins Marcelino, Raphaela Carvalho Machado (UNESP, Guaratinguetá)
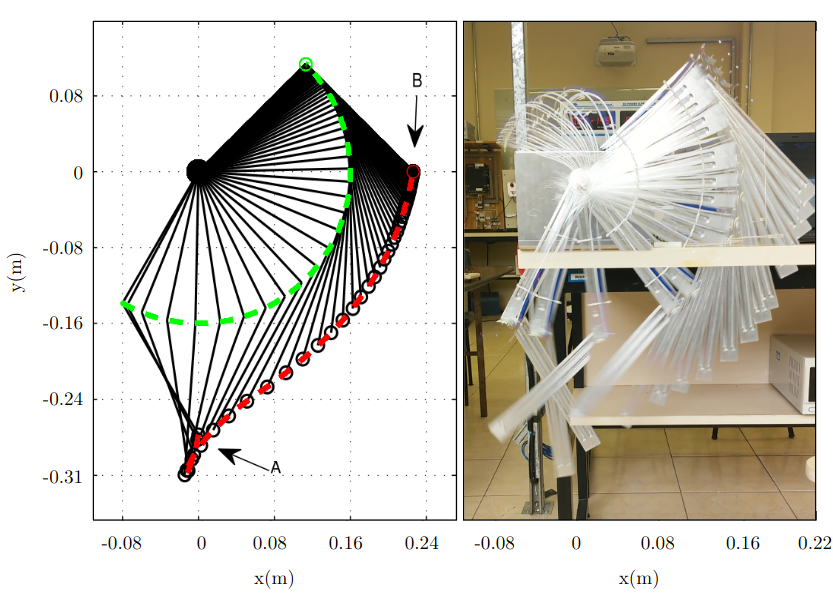
Nonlinear dynamic behavior and control of a non-ideal crank-rod system (UTFPR)

References
Nonlinear Control and Parametric Uncertainties of Flexible-Joint Robots Experiment (UTFPR)
This study examines the relationship between the nonlinear behavior of the flexible joints of a two-degree-of-freedom robot and the controllability and parametric uncertainties of the system.

References
Prototyping laboratory (UTFPR)
